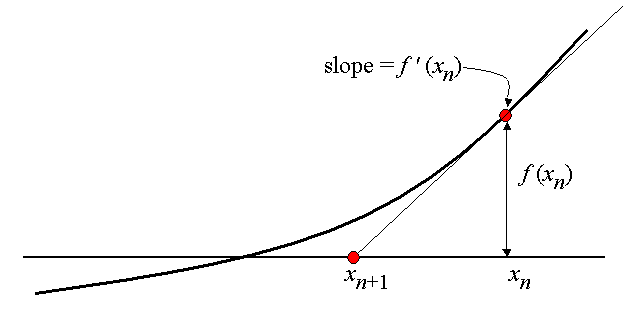
Newton method
Consider the function \varphi(x): \mathbb{R} \to \mathbb{R}. Let there be equation \varphi(x^*) = 0. Consider a linear approximation of the function \varphi(x) near the…
It is known, that antigradient -\nabla f (x_0) is the direction of the steepest descent of the function f(x) at point x_0. However, we can introduce another concept for choosing the best direction of function decreasing.
Given f(x) and a point x_0. Define B_\varepsilon(x_0) = \{x \in \mathbb{R}^n : d(x, x_0) = \varepsilon^2 \} as the set of points with distance \varepsilon to x_0. Here we presume the existence of a distance function d(x, x_0).
x^* = \text{arg}\min_{x \in B_\varepsilon(x_0)} f(x)
Then, we can define another steepest descent direction in terms of minimizer of function on a sphere:
s = \lim_{\varepsilon \to 0} \frac{x^* - x_0}{\varepsilon}
Let us assume that the distance is defined locally by some metric A:
d(x, x_0) = (x-x_0)^\top A (x-x_0)
Let us also consider first order Taylor approximation of a function f(x) near the point x_0:
\tag{A1} f(x_0 + \delta x) \approx f(x_0) + \nabla f(x_0)^\top \delta x
Now we can explicitly pose a problem of finding s, as it was stated above.
\begin{split} &\min_{\delta x \in \mathbb{R^n}} f(x_0 + \delta x) \\ \text{s.t.}\;& \delta x^\top A \delta x = \varepsilon^2 \end{split}
Using \text{(A1)} it can be written as:
\begin{split} &\min_{\delta x \in \mathbb{R^n}} \nabla f(x_0)^\top \delta x \\ \text{s.t.}\;& \delta x^\top A \delta x = \varepsilon^2 \end{split}
Using Lagrange multipliers method, we can easily conclude, that the answer is:
\delta x = - \frac{2 \varepsilon^2}{\nabla f (x_0)^\top A^{-1} \nabla f (x_0)} A^{-1} \nabla f
Which means, that new direction of steepest descent is nothing else, but A^{-1} \nabla f(x_0).
Indeed, if the space is isotropic and A = I, we immediately have gradient descent formula, while Newton method uses local Hessian as a metric matrix.

